autonomous futures
Illinois Institute of Technology
Chicago, IL
Prof. Nilay Mistry
Spring 2019
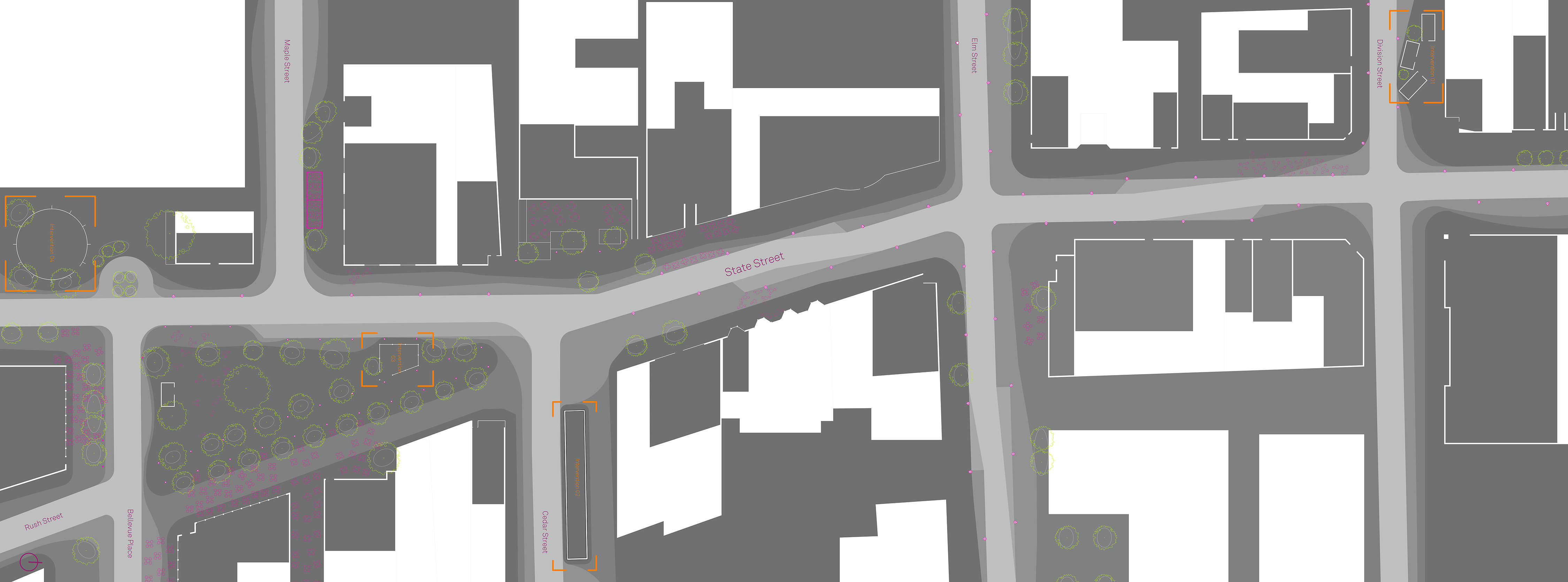
Our streets reflect the hierarchy of users - and currently, cars dominate in rigid, unflexible urban streets. As society transitions to autonomous vehicles, now is the time to rethink our streets. The proposal allows for a constant interplay between the users by taking advantange of the limits of LIDAR technology used in autonomous vehicles. Rather than have only a one-size-fits-all street section, the street itself will come alive and change to reflect the needs of users.
Video elements of project: https://vimeo.com/324841473
Maximize Pedestrian Zone ![]()

Activate Drop-Offs![]()

Balance Pedestrian and Vehicle![]()

Maximize Vehicle Roadway![]()

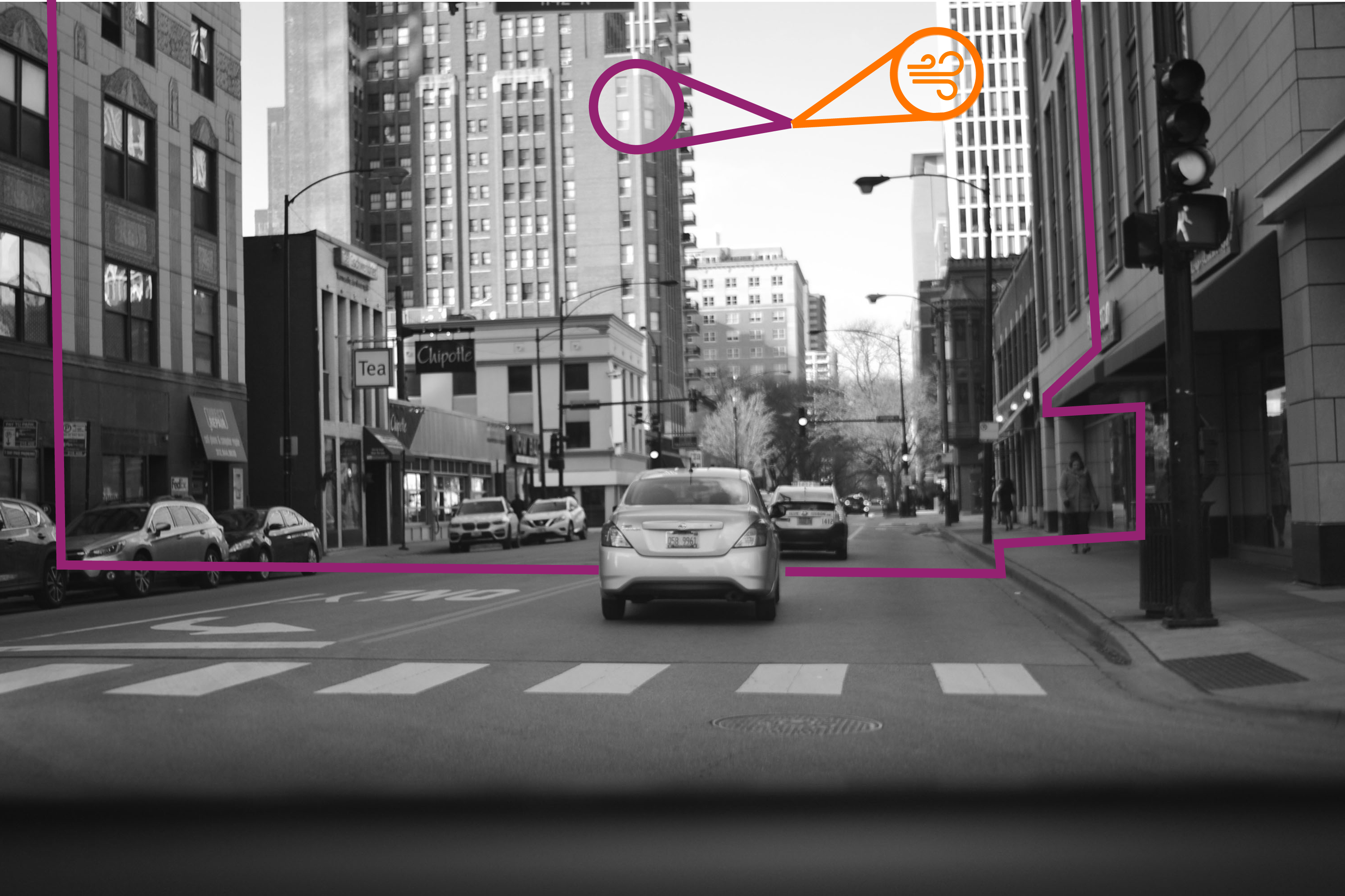
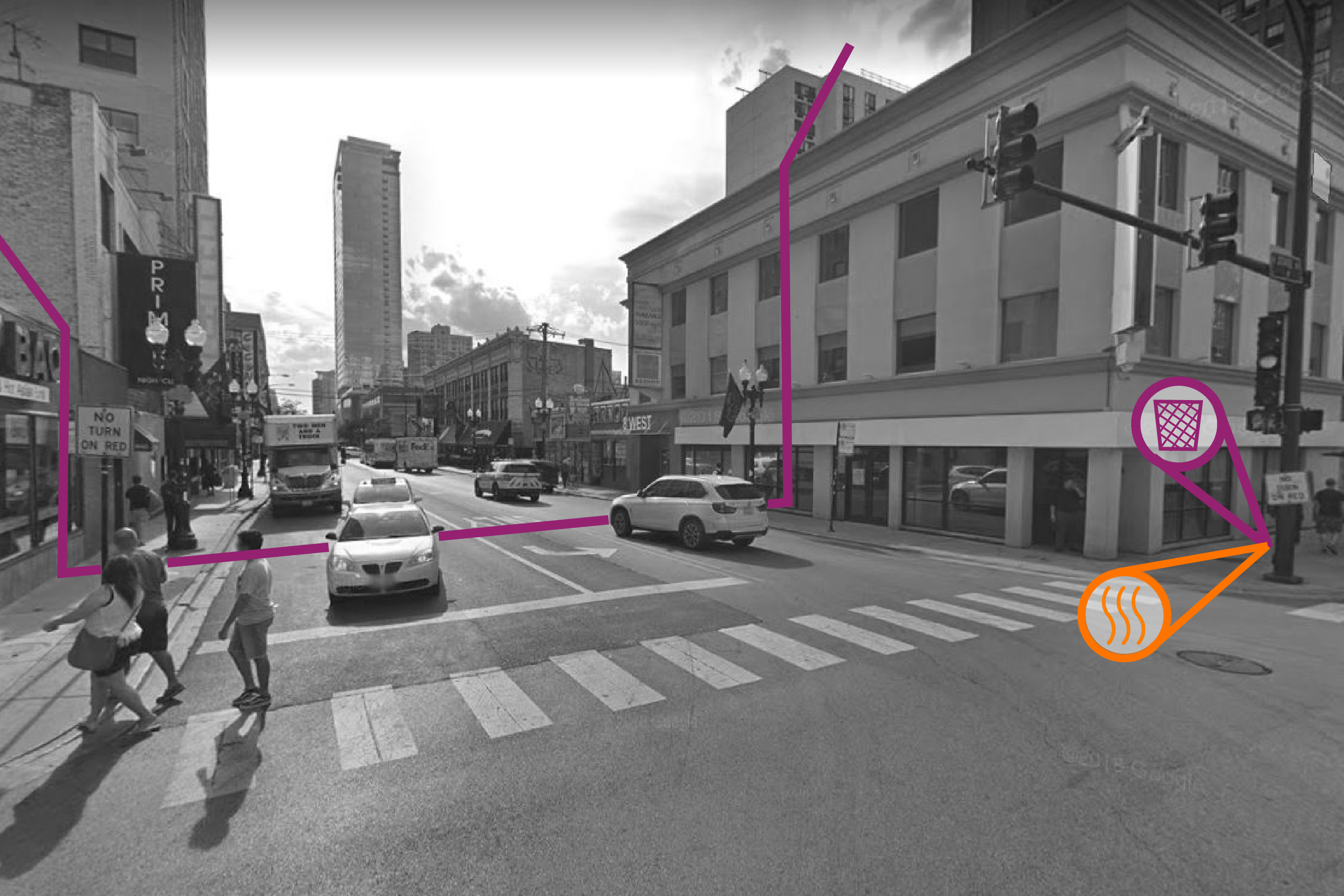
Using LIDAR, autonomous vehicles are able to sense what is around them by rapidly scanning their surroundings with lasers. It is like seeing - but not quite. This difference can be exploited to create 100% pedestrian zones where cars do not drive by placing objects such as benches, street lights, and trees to block LIDAR. Sensors in the road can be used to activate other areas as well, allowing pedestrian activity to expand to fill most of the street.
Below: Row 1: what LIDAR doesn’t see / Row 2: what LIDAR doesn’t sense / Row 3: Streets of the Future
Below: Row 1: what LIDAR doesn’t see / Row 2: what LIDAR doesn’t sense / Row 3: Streets of the Future













As vehicles transition to being primarily autonomous, cities will also need to adjust what is considered public transportation. This project proposes the creation of the Autonomous Vehicle Authoritity, similar to the CTA today in Chicago. The AVA will manage a fleet that includes autonomos buses, shuttles, and cars that with either run lines as CTA buses do today, or be hailed on demand. Users will have a fare card/ account to pay for rides.
